Projekt - IMOCO4.E
|
|
Projekt Info:
| Name | IMOCO4.E (Intelligent Motion Control under Industry 4.E) |
| Projekt Webseite | https://www.imoco4e.eu/ |
|
EU Funding & Tenders Portal
|
https://ec.europa.eu/ |
|
CORDIS - EU research results
|
https://cordis.europa.eu/ |
|
Skillset/Fähigkeiten
|
Software-/Enwicklungsberatung, Software-Archtiktur-Design, Development, Videoschnitt |
|
Technologien
|
Unity, VR, AI, Pathfinding, Digitale Zwillinge, Machine Learning, Realtime Rendering, ROS2 & mehr |
Beschreibung:
IMOCO4.E ist ein EU-finanziertes Forschungsprojekt, das eine edge‑to‑cloud‑basierte Bewegungssteuerungsintelligenz für Human‑in‑the‑Loop Systeme entwickelt. Ziel ist die Bereitstellung einer Referenzplattform, die KI‑ und Digital‑Twin‑Toolchains sowie modulare Bausteine für robuste Fertigungsanwendungen kombiniert. Die Plattform soll durch Energieeffizienz, einfache Konfiguration, Nachvollziehbarkeit und Cybersicherheit überzeugen und wird in einer Reihe von Anwendungsfeldern – von der Halbleiter- und Verpackungsindustrie bis hin zu industriellen Robotern und Gesundheitssystemen – getestet, um die Vorteile in allen Teilen der Produktions‑ und AnwendungsKette zu demonstrieren. Im Kern setzt IMOCO4.E neue Sensortechnologien, modellbasierte Ansätze und das Industrial‑Internet‑of‑Things ein, um mechatronische Systeme intelligenter, anpassungsfähiger, zuverlässiger und leistungsfähiger zu machen, während gleichzeitig ihre Leistung an die physischen Grenzen angeglichen wird. Das Projekt bewertet die Anforderungen an die zukünftige Smart‑Manufacturing‑Infrastruktur in Europa und kooperiert mit dem Industry‑4.E‑Cluster sowie weiteren Lighthouse‑Projekten, um Best‑Practice‑Methoden für das europäische Forschungs‑ und Innovationsökosystem zu definieren. An zwei Pilotprojekte waren wir an praktische Umsetzung beteiligt:
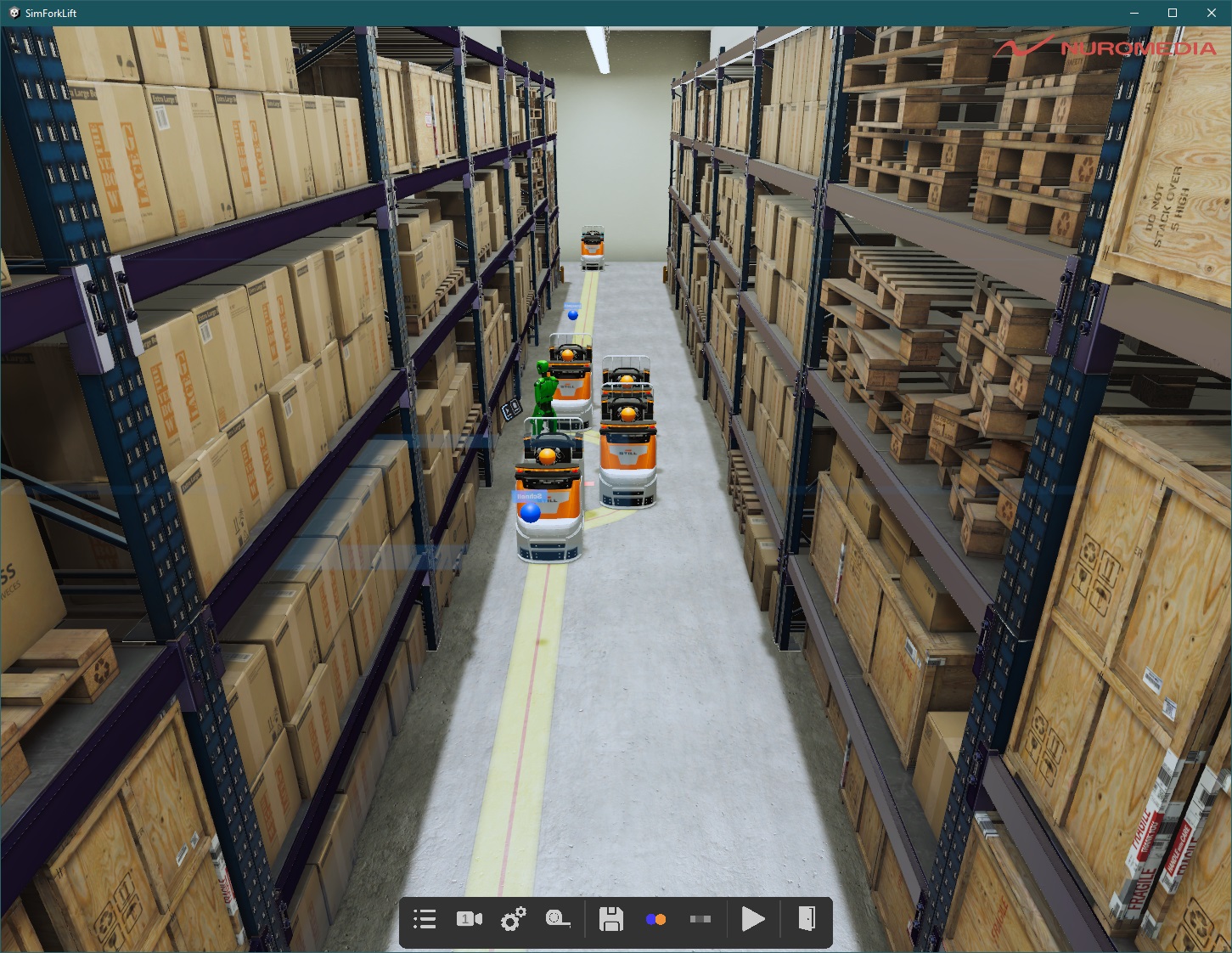
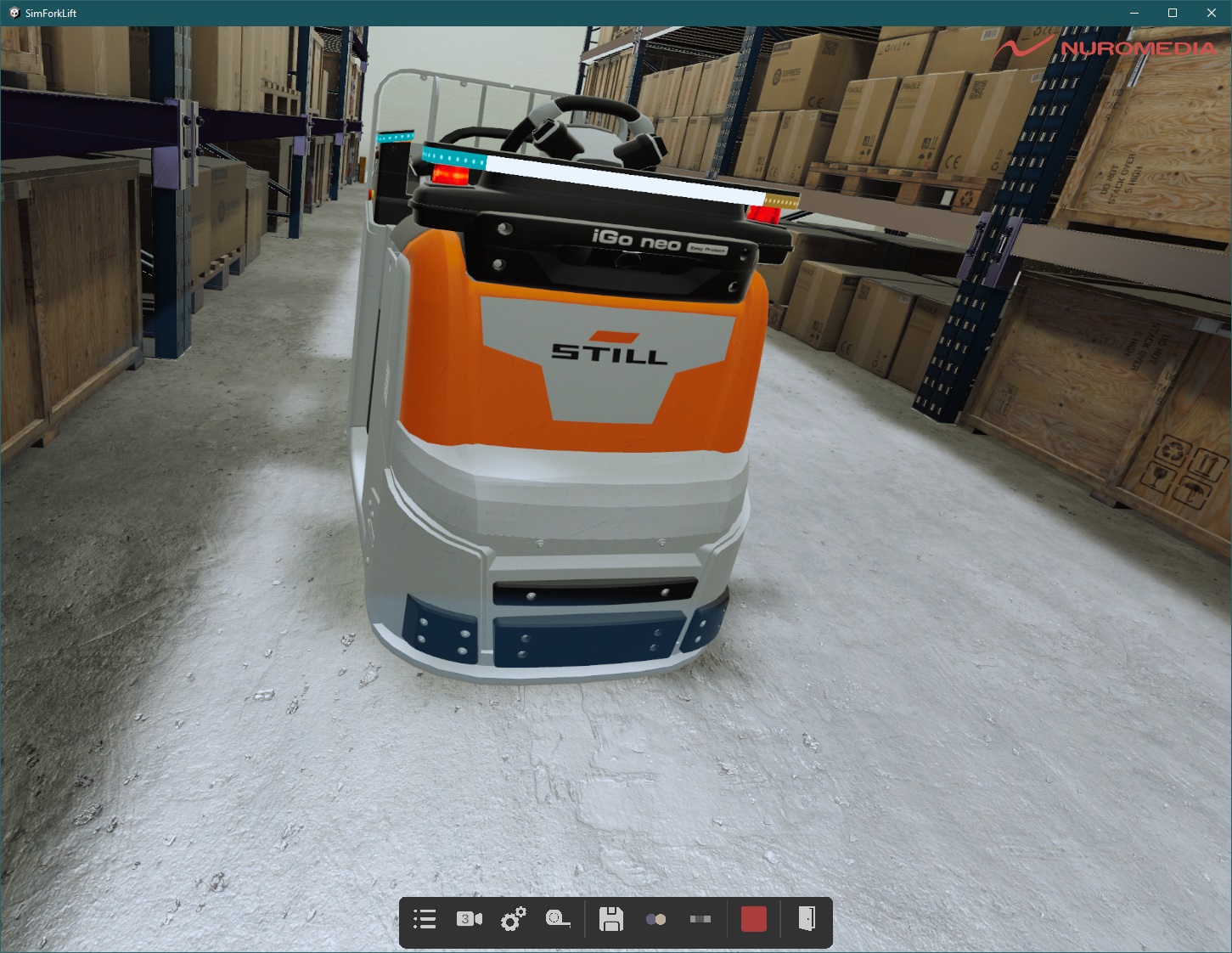
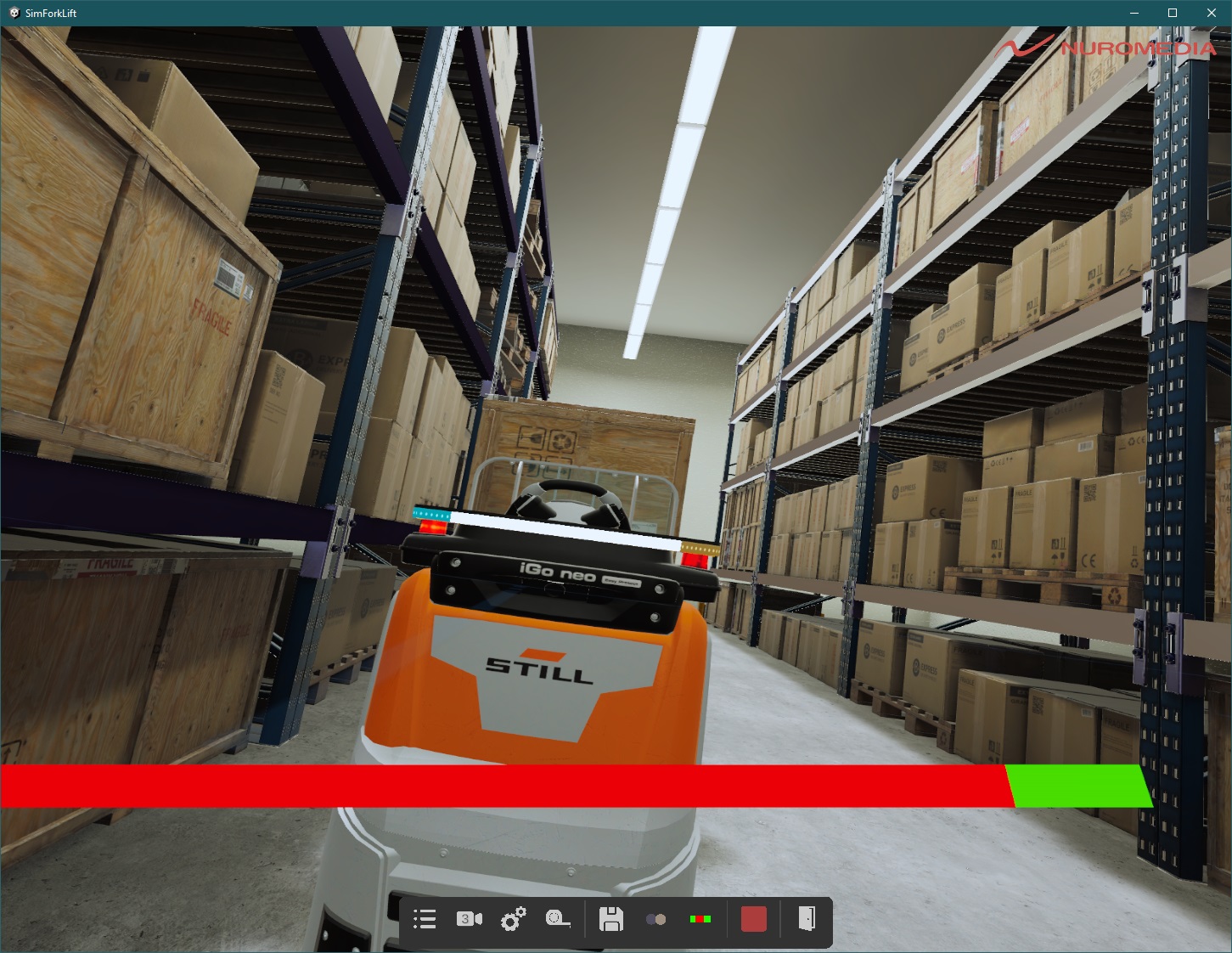
1) STILLs „iGo neo“ – ein autonom fahrendes Lagerfahrzeug – nutzt digitale Zwillinge und KI, um durch hochsensible Laserscanner, Kameras und Radar die Umgebung in Echtzeit zu erfassen, Hindernisse zu erkennen und selbstständig Pfade zu planen
2) die ADAT3‑XF‑Die‑Attach‑Plattform von Nexperia ITEC, unterstützt von einem digitalen Zwilling, steigert die Präzision, Produktionsrate (bis zu 72 000 Produkte/Std.) und Prozessportabilität über mehrere Fertigungslinien hinweg. Durch diese Pilotstudien demonstriert IMOCO4.E, wie intelligente Bewegungssteuerung und Digital‑Twin‑Technologien die Effizienz, Zuverlässigkeit und Skalierbarkeit moderner Fertigungssysteme nachhaltig verbessern können.
Aufgabe:
Pilot 1 – iGo neo
Ich entwickelte zunächst einen VR‑Digitalen Zwilling des STILL‑iGo neo, der über einen PlayStation‑4‑Controller, ein Gaming‑Lenkrad und oder eine an das Fahrzeug angebrachte Eathernet bedient werden konnte. Dieser Ansatz wurde zu einer Testumgebung ausgebaut, in der Nutzer Bremspunkte und Ausweichpfade festlegen und in einer sicheren Umgebung simulieren konnten. Die dabei gesammelten Daten dienen einer KI‑Trainingsreihe, die darauf abzielt, regulatorisch zulässige, aber für Menschen zu unangenehme Maßnahmen (z. B. abruptes Bremsen) zu optimieren. Zusätzlich erstellte ich eine zweite Anwendung, die das gesamte Lagerhaus (inklusive eines Ausstattungseditors) abbildet und synthetische Micro‑Doppler‑Radar‑Daten für das KI‑Training generiert. Diese Anwendung wurde mit einem ROS 2‑Interface ausgestattet, sodass die Simulation multi‑userfähig ist und der iGo neo über MATLAB oder Gazebo gesteuert werden kann. Ziel war es, die trainierten KI‑Modelle in einem sicheren Testumfeld insbesondere bei der Maschinen‑Mensch‑Interaktion zu validieren. Parallel unterstützte ich die Entwicklung der Wegfindungsalgorithmen für das Planungs‑Tool, das die Aufgabenverteilung und den Einsatz der autonomen Gabelstapler plant.
Pilot 2 – ADAT3‑XF Digital Twin
Im zweiten Pilotprojekt führte ich die Anforderungsanalyse durch und arbeitete eng mit dem Entwickler zusammen, um die Softwarearchitektur zu entwerfen. Dabei lag der Schwerpunkt auf der Aufteilung von Datenfluss, Simulationsmodellen und Echtzeit‑Schnittstellen. Ich half bei der Umsetzung, insbesondere bei Problemen mit physikalischen Berechnungen und der Echtzeit‑Performance, die bei der Integration des Digital Twins in die bestehende Simmulationspipeline kritische Engpässe verursachten. Durch gezielte Optimierungen und die Implementierung von effizienteren Algorithmen konnten die Simulationsergebnisse verbessert und die Reaktionszeiten der Steuerungssoftware reduziert werden.
Screenshot & Videos: